
Lundell generator (alternator)
Increasing comfort and safety in cars, trucks, and buses driven by combustion engines require more installed electric power on board. As of now, the Lundell generator (claw-pole rotor generator) is the only type of automotive generator used in industry, with total powers per unit up to 5 kW and speeds up to 18,000 rpm.
 Every car has it - The Lundell generator with claw-pole rotor (on photo: Jeep 2.5 liter 4-cylinder engine, chromed - close up of the alternator; credit: wikipedia)
Every car has it - The Lundell generator with claw-pole rotor (on photo: Jeep 2.5 liter 4-cylinder engine, chromed - close up of the alternator; credit: wikipedia)The solid rotor claw-pole structure with ring-shaped single direct current (DC) excitation coil, though supplied through slip-rings and brushes from the battery on board, has proven to be simple and reliable, with low cost, low volume and low excitation power loss.
Its main demerit is the rather large losses (low efficiency), around 50% at full power and high speed. Producing electricity on board with such high losses is no longer acceptable as the electric power requirements per vehicle increase.
Improvements to the claw-pole rotor generator (or Lundell generator) design for better efficiency at higher powers per unit are currently under great investigation by both industry and academia.
The first commercial mild hybrid electrical vehicle, launched in 2002, makes use of the Lundell machine as a starter (generator).
Construction and Working Principle
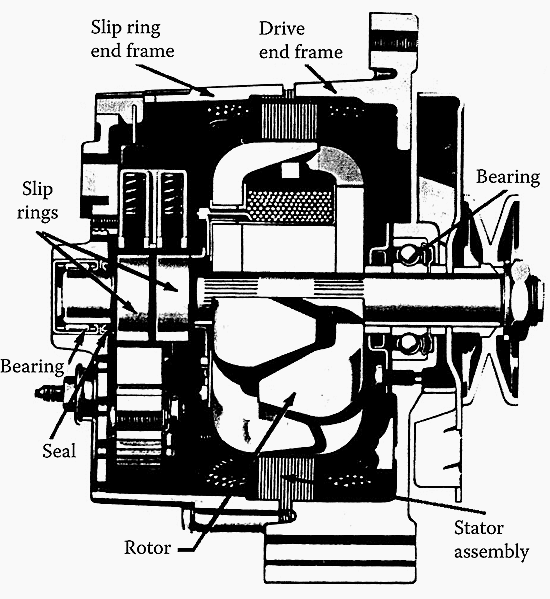
A cross-section of a typical industrial claw-pole rotor generator is shown in Figure 1 below. It contains the following main parts:
- Uniformly slotted laminated stator iron core
- Three-phase alternating current (AC) winding: typically one layer with q = 1, 2 slots per pole per phase, star or delta connection of phases
- Claw-pole rotor made of solid iron parts that surround the ring-shaped DC-fed excitation (single) coil
- Copper slip-rings with low voltage drop brushes to transfer power to the DC excitation coil on the rotor
- Bearings and an end frame made of two sides — the slip ring side and the drive-end side. The generator is driven by the internal combustion engine (ICE) through a belt transmission.
The Lundell generator AC output is rectified through a three or four-leg diode rectifier and connected to the on-board battery (Figure 2). Today, 14 Vdc batteries are used, but 42 Vdc batteries are now adopted as the new standard for automotive application loads.
The diodes D1 to D6 (D8) serve the full-power output rectification and are designed for the maximum power of the generator. For large units (for trucks, etc.), three elementary diodes in parallel are mounted on radiator semilegs to comply with the rather high current levels involved (28 Vdc batteries are typical for large vehicles).

The excitation coil is supplied from the generator terminals through a half-bridge diode rectifier of low current level (in the 5 to 20 A interval) and a DC–DC static power converter. A voltage sensor and regulator command the DC–DC converter to keep the voltage of the battery in a certain interval (roughly 12 to 17 Vdc, for 14 Vdc batteries) at all times, and provides overvoltage and overcurrent protection.
The battery voltage depends on the state of charge, on its ambient temperature, and on the load level.
In designing the generator, the extreme conditions for the battery have to be considered. When the temperature decreases, the battery voltage increases for all states of battery charge. For 100% battery charge, the battery voltage may increase from 13.4 V at 60°C to 16 V at 20°C.
For 10% battery charge, the same voltages are, respectively, 10.75 V and 14 V. Battery age plays an important role in voltage regulation.
Comprehensive modeling of the battery is required to exploit it optimally, as the average life of a battery is around 5 years or more for a typical car of today. The generator should provide the same current for the load (or for the battery charge) from the ICE idle speed (700 to 1000 rpm, in general) onward.
The excitation circuit is disconnected when the ICE is shut down, to save in battery life and in fuel consumption.
The stator windings for cars, especially, are the one-layer type, with q = 1 slot/pole/phase and with diametrical coils. They are machine-inserted in the slots, and the slot filling factor Kfill is modest (around or less than 0.3 to 0.32).
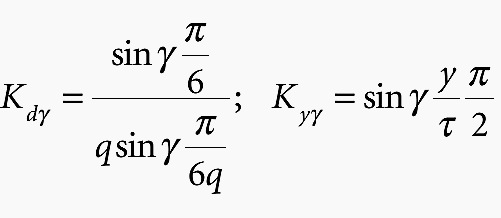
Only with large power units (P > 2.5 to 3 kW), q = 2, when chorded coils are used, to reduce magnetomotive force (mmf) first-space harmonics (fifth and seventh), the distribution and chording factors, for the γth harmonic, Kdγ, Kyγ, are as follows:
For q = 1, chording the coils to y/τ = 2/3, as the only possibility, the mmf fundamental (or power) is as follows:

This is why chording is not generally used for q = 1, though the length of coil end turns would be reduced notably, and so would the stator winding losses. The number of poles is, in general, 2p1= 12, as a compromise between size reduction and increasing iron core loss. Also, 2p1= 14, 16, 18 are used for larger power units (for buses, trucks, etc.).

For completeness, let us include here the typical three-phase, Ns = 36 slots, 2p1 = 12 poles winding (Figure 3a and Figure 3b). Only one phase is shown in slots. The mmf distributions for sinusoidal currents for:
ia1 = imax = − 2ib1 = − 2ic1 and for ia1 = 0, ib1 = ic1 = − imax√3/2 are also shown.
The mmf distribution changes between the extreme shapes in Figure 3a. With the diode rectifier, the waveform of the stator phase currents changes from quasi-rectangular (discontinuous) at idle engine speed to quasi-sinusoidal (continuous) waveform at higher speeds (Figure 4).
For the eight-diode bridge, the existence of null current leads to a third harmonic in the phase currents. So, even without considering the magnetic saturation, the mmf space harmonics and phase current time harmonics pose specific problems to the operation of the Lundell machine, which is, otherwise, a salient-pole rotor synchronous machine.
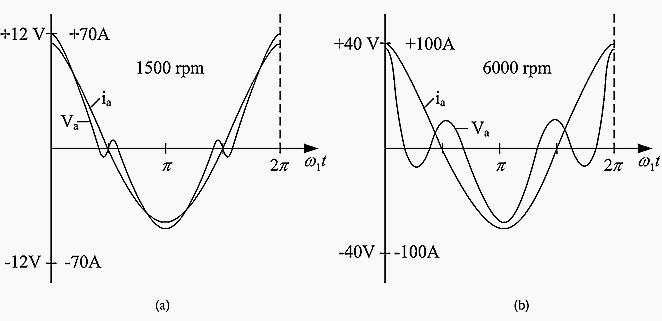
Typical phase voltage and current waveforms at 1500 and 6000 rpm are shown in Figure 5a and Figure 5b, with rectifier and resistive load (no battery).
As the speed increases notably, third harmonics show up in the phase voltage. Also, the phase shift between the fundamental voltage and current increases from about 1° at 1500 rpm to 9° at 6000 rpm. This latter phase lag is categorically due to the commutation of diodes – three diodes work at a time at high speeds – in corroboration with the machine commutation inductances.

The third harmonic in the phase voltage under load comes from the distribution of the flux density in the air gap. This, in turn, is due to magnetic saturation in corroboration with the q = 1 diametrical winding and slot openings.
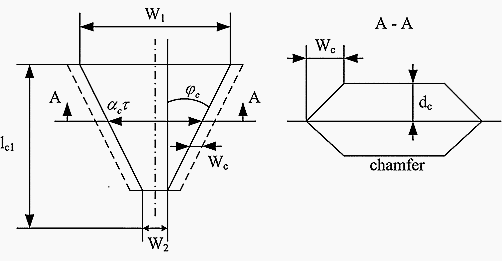
The trapezoidal shape of the claw poles (Figure 6) corresponds to a kind of double skewing and thus produces some reduction in flux density and radial force harmonics. Noise is reduced this way also, and so is the axial force.
With τ the pole pitch, the same in the stator and rotor, the claw-pole span in the middle of stator stack, αcτ, is the main design variable for claw poles. The additional geometrical variables are (Figure 6) ϕc, W1,W2, dc, and Wc.
In general, the pole angle αc= 0.45 to 0.6 and the claw angle is ϕc= 10 to 20°. The lower values of αc and ϕc in the above intervals tend to produce higher output with rectifier and battery operation.
Taking note of the above peculiarities of the Lundell generator, we can make a 4 remarks //
Remark #1
An analytical constant parameter treatment, with only the fundamental phase voltage and current considered, should be used only with extreme care, as it is prone to large errors due to magnetic saturation at low speeds and due to armature-reaction flux density caused distortion at high speeds.
Remark #2
Including magnetic saturation only by equivalent saturation factors pertaining to fundamental flux distribution may not produce practical enough third harmonic values at high speeds (in Figure 5b: V = 9.71 V and V = 7.21 V at 6000 rpm).
Remark #3
For the eight-diode rectifier, the phase voltage third harmonic in the phase current occurs. The null current is three times the third-phase harmonic current.
Remark #4
In this case, applying the fundamental circuit model brings a bit more realistic results, but still, the third harmonic current has to be calculated separately, and its losses are included when efficiency is determined.
Three-dimensional finite element method (FEM) or magnetic equivalent circuit (MEC) modeling was applied to portray Lundell generator performance – steady state and transients – with remarkable success. The MEC approach, however, requires at least two orders of magnitudes (100 times) less computer time.
Reference // The Electric Generators Handbook – VARIABLE SPEED GENERATORS by ION BOLDEA Polytechnical Institute Timisoara, Romania










Edvard very informative, question what if neo magnets are inserted in the rotor instead of the DC. also has anyone done a harmonic map or frequency chart over the whole rev range and what happens when the diode block shorts .At what point(RPM)does resonance occur.
You article was really helpful, as it was detail such I got more information about how it work.
Thanks
Excellent article. I was looking for the description of the rotor and here I found exactly what I need.
The article title says every car has one of these.
Mine doesn’t. The Nissan LEAF has no use for this generator, it has solid state an inverter instead.
Hello Edvard,
Your article is very interesting. I have a few questions which you might have answers to or able to point me to the right source:
1/ I would like to get a detailed illustration/description of the construction and function of the claw-pole ROTOR. I need answers to questions such as: “Why does it have to be shaped like that”.
2/ If I wanted to do serious design of electromagnets to use in my Alternator project, where could I get information. I have dug through the web but found only scraps.
Thank you very much for your kind response.