
Estimated Study Time: 10 minutes
The basic functions of an AC drive
We can confidently say that the AC drive is the leading motor control method. This technical article deals with a closer look at the different features of the AC drive, and the levels of performance the drive can offer.
 Main features that make AC drive the leading control method (on photo: ABB's AC inverters; credit: sistelecbcn.es)
Main features that make AC drive the leading control method (on photo: ABB's AC inverters; credit: sistelecbcn.es)In this diagram, the basic functions of an AC drive are presented. There are four different components in AC drive motor control. These components are the user interface, the motor, the electrical supply and the process interface.

An electrical supply feeds the required electricity to the drive. One selection criteria for the drive is the supply voltage and its frequency. The AC drive converts the frequency and voltage and feeds the motor. This conversion process is controlled by signals from the process or user via the process and user interfaces.
A motor’s load capacity curves with an AC drive
If the motor is driven without a frequency converter, its load capacity curves cannot be modified. It will produce a specified torque at certain speed and maximum torque cannot be exceeded.

With a frequency converter drive, there are different loading options. The standard curve, Curve 1 in the diagram, can be used continuously. Other curves can only be used for certain periods of time, because the motor’s cooling system is not designed for this kind of heavy use.
To be able to use these features it is very important that the load, the AC drive and the motor are compatible. Otherwise the motor or the converter will overheat and be damaged.
Some of the most important features of AC drive:
- Reversing function and Ramp times acceleration/deceleration
- Variable torque V/Hz settings and Torque boosting
- Eliminating mechanical vibrations
- Power loss ride-through
- Stall function
- Slip compensation
- Flying start
- Environmental features
AC drive features for better process control
AC drives also have other internal features and functions which are sometimes required for better process control. Examples of these features are listed in the diagram. With inputs and outputs for example, different kinds of process information can be fed to the drive and it will control the motor accordingly.
Alternatively, the load can be limited to prevent nuisance faults and to protect the working machine and the whole drive system.
In the following lines the listed features are presented in more detail.
1. Reversing
Reversing the motor rotation is simple to accomplish with an AC drive. With ABB’s frequency converters it can be achieved simply by pressing one button. Furthermore, it is possible to set different acceleration and deceleration ramp times.

Go back to AC drive features ↑
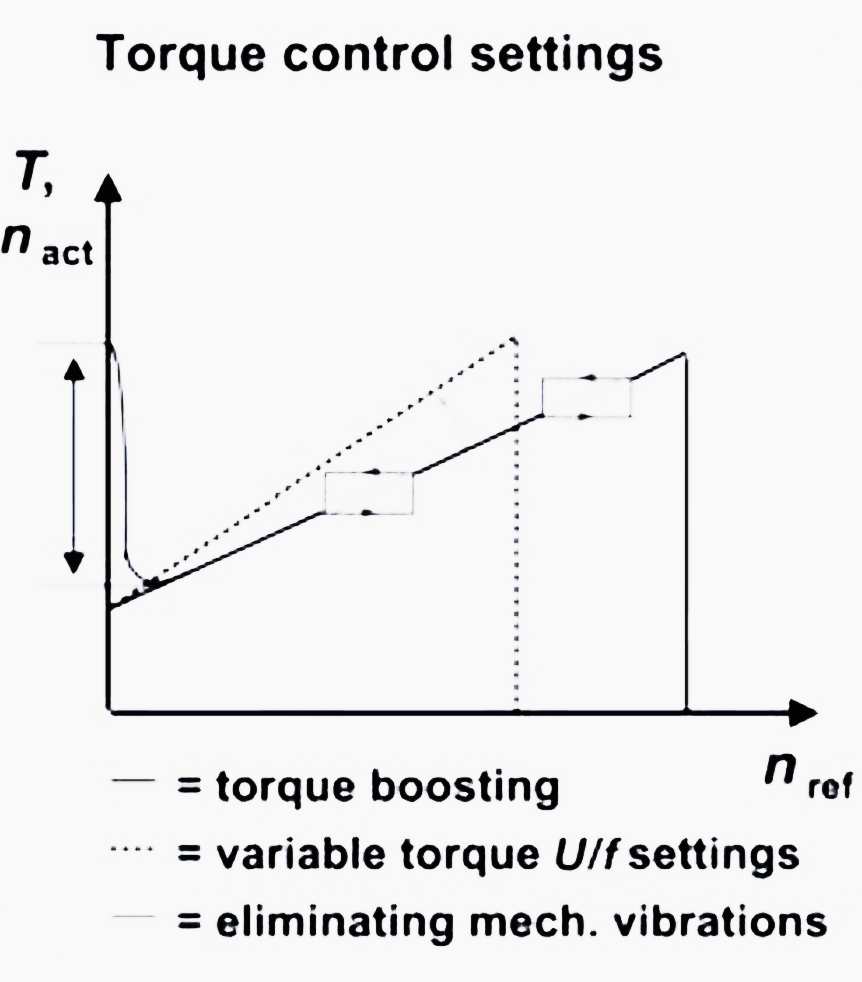
2. Torque control
Torque control is relatively simple with an AC drive. Torque boosting is necessary if a very high starting torque is required. Variable torque U/f settings mean that maximum torque can be achieved at a lower speed of rotation than normal.
Go back to AC drive features ↑
3. Eliminating mechanical vibrations
Mechanical vibrations can be eliminated by by-passing critical speeds. This means that when a motor is accelerated close to its critical speed, the drive will not allow the actual speed of the motor to follow the reference speed.
When the critical point has been passed, the motor will return to the regular curve very quickly and pass the critical speed.
Go back to AC drive features ↑
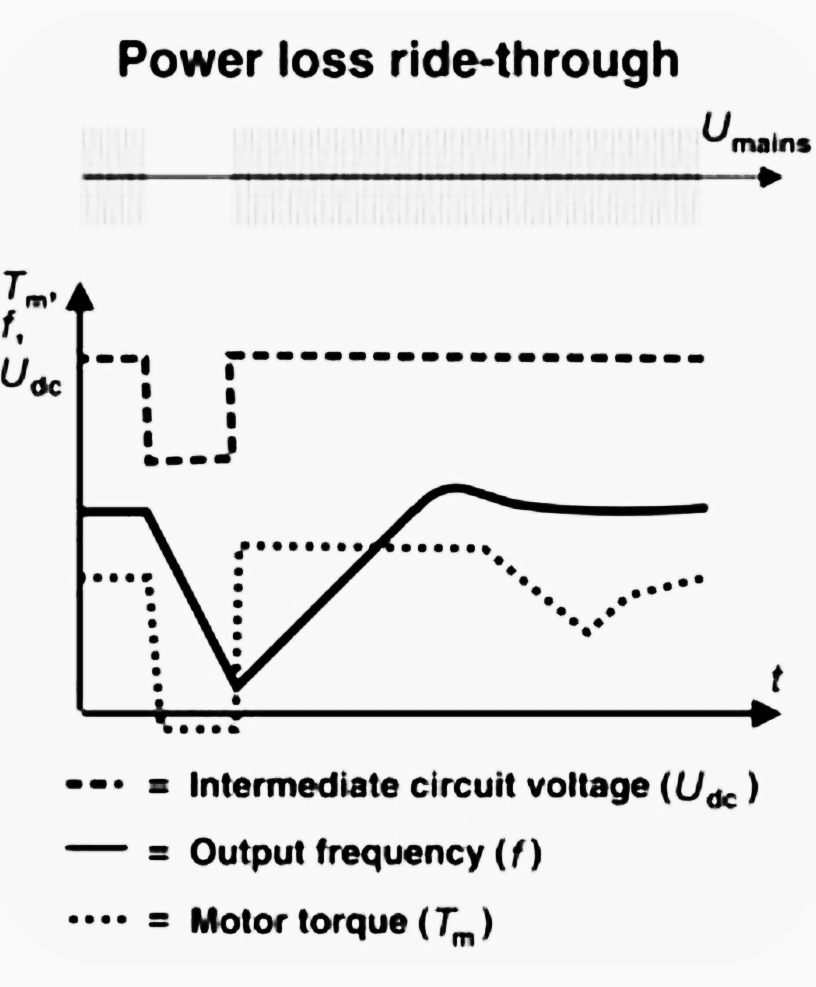
4. Power loss ride-through
The power loss ride-through function is used if the incoming supply voltage is cut off. In such a situation, the AC drive will continue to operate using the kinetic energy of the rotating motor. The drive will be fully operational as long as the motor rotates and generates energy for the drive.
Go back to AC drive features ↑
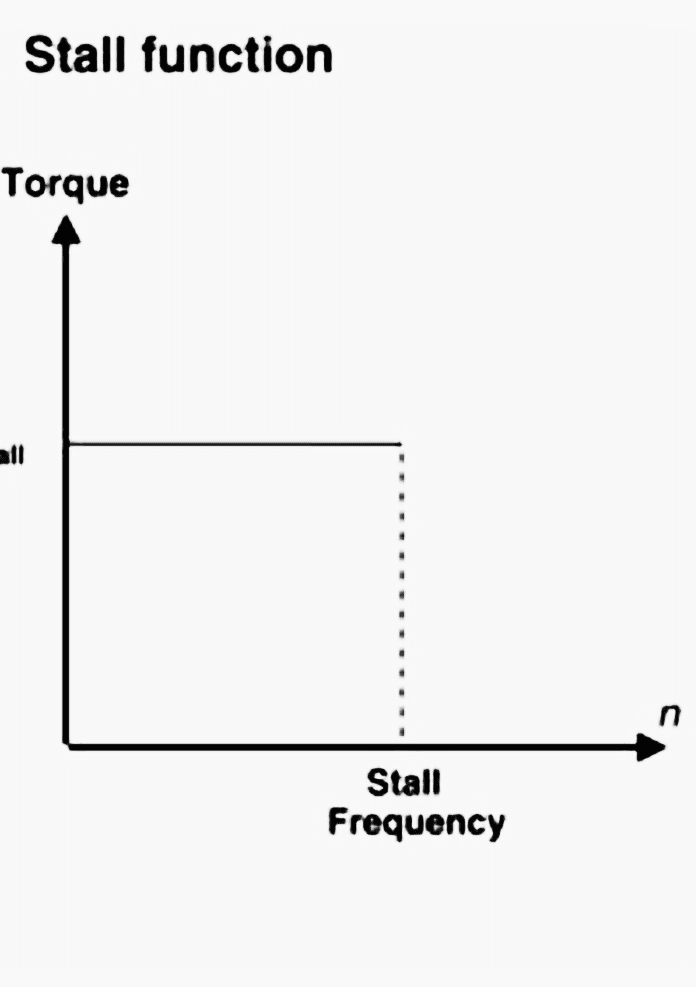
5. Stall function
With an AC drive, the motor can be protected in a stall situation with the stall function. It is possible to adjust supervision limits and choose how the drive reacts to the motor stall condition.
Protection is activated if three conditions are met at the same time:
- The drive frequency has to be below the preset stall frequency.
- The motor torque has to rise to a certain limit, calculated by the drive software.
- The final condition is that the motor has been in the stall limit for longer than the time period set by the user.
6. Slip compensation
If the motor load torque is increased, the speed of the motor will decrease as shown in the diagram. To compensate for this slip, the torque/speed curve can be modified with the frequency converter so that torque increase can be accomplished with the same speed as previously.

Go back to AC drive features ↑
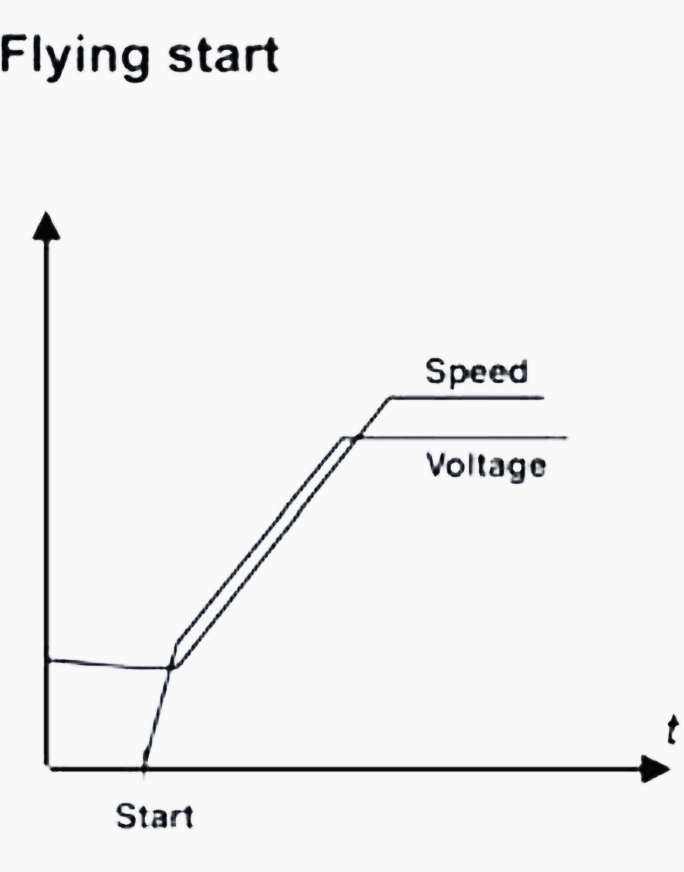
7. Flying start
The flying start feature is used when a motor is connected to a flywheel or a high inertia load. The flying start works even without a speed feedback. In case of rotating motor, the inverter is first started with a reduced voltage and then synchronised to the rotating rotor.
After synchronised the voltage and the speed are increased to the corresponding levels.
Go back to AC drive features ↑
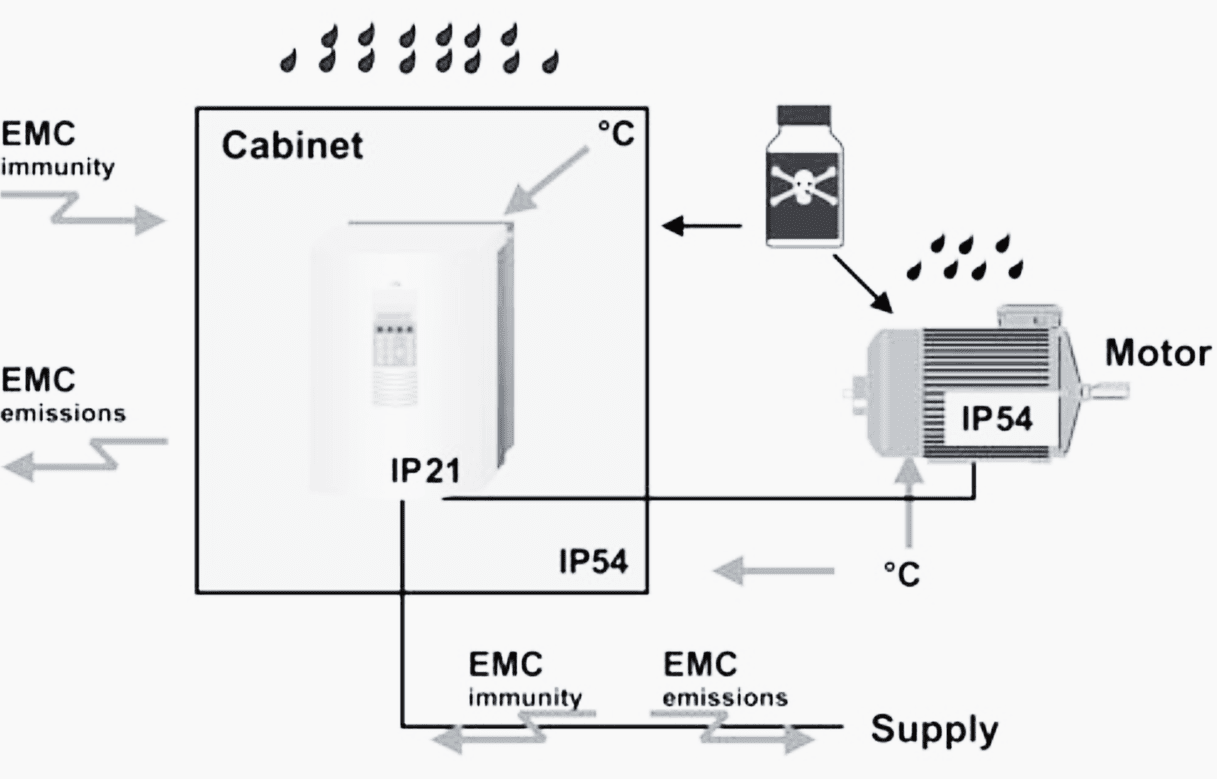
8. Environmental features
Any drive system has to handle different environmental stresses such as moisture or electrical disturbances. The squirrel cage motor is very compact and can be used in very hostile conditions. The IP54 degree of protection guarantees that it can work in a dusty environment and that it can bear sprinkling water from any direction.
If a higher degree of protection is required, it can be obtained, for example, by installing the drive inside a cabinet with the required degree of protection. In such cases, it is essential to ensure that the temperature inside the cabinet will not exceed the allowed limits.
Go back to AC drive features ↑
EMC (Electromagnetic compatibility)
Another important environmental feature is electromagnetic compatibility (EMC). It is very important that a drive system fulfills the EMC directives of the European Union.
This means that the drive system can bear conductive and radiative disturbances, and that it does not send any conductive or radiative disturbances itself either to the electrical supply or the surrounding environment.
Go back to AC drive features ↑
Reference // Guide to variable speed drives by ABB
Related electrical guides & articles












Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi

I am very happy sir because your article very helpful