
Estimated Study Time: 10 minutes
The basics of synchronous machines
Synchronous machines can be used as generators or motors. They are of 3-phase construction, even though some special exceptions can be found. A bulk of the applications are within power ranges roughly varying from a megawatt level to several tenths (or even hundreds) of megawatts with rated voltages from 3 kV to 15 kV.
 The basics of synchronous machines you MUST fully understand (on photo: ABB Type AMS 900L6L BST 13700kW / 11688kVA Brushless Synchronous Motor/Generator. 12470V, 60Hz, 1200RPM; credit: phxequip.com)
The basics of synchronous machines you MUST fully understand (on photo: ABB Type AMS 900L6L BST 13700kW / 11688kVA Brushless Synchronous Motor/Generator. 12470V, 60Hz, 1200RPM; credit: phxequip.com)Special designs of the HV synchronous machines have also been introduced whose rated voltages can be of several tenths of kilovolts.
On the other hand, the excitation control features cater for more flexible means of operating the machine with the optimal reactive power flow according to the network conditions.

The armature winding is commonly placed in the stator whose construction is of the three- phase design and quite similar to asynchronous machines. The field winding is placed in the rotor whose design is quite different from the ones in asynchronous machines.
A typical example of slow-speed applications is a hydro power plant generator, whereas a steam turbine generator would represent an example of high-speed applications.
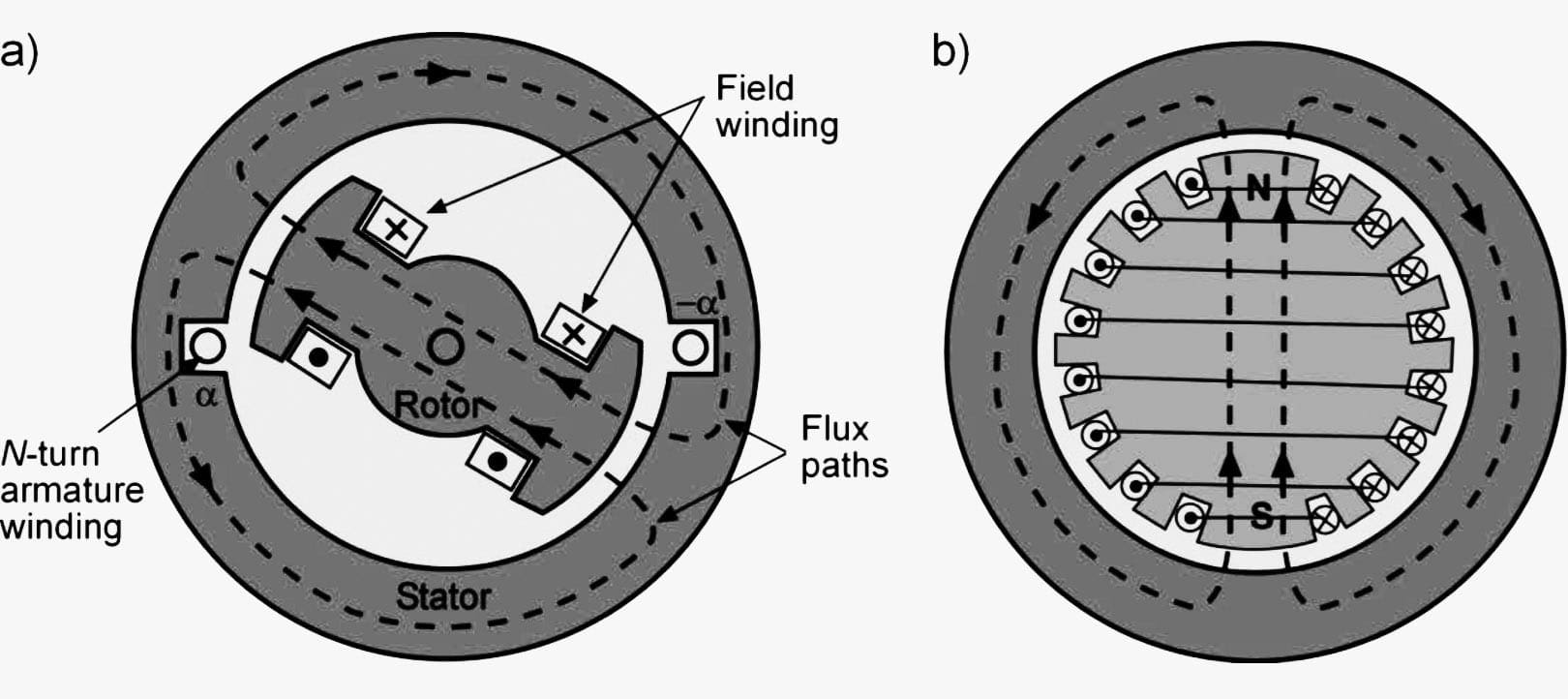
The rotor is excited through the field winding with a DC power source. In motor applications, the excited rotor rotates according to the speed of the three-phase AC-field in the stator.
In generator use, the prime mover rotates the excited rotor generating an EMF to the stator windings, whose magnitude and frequency correspond to the excitation power in the rotor and the rotating speed of the prime mover.
Under normal operation conditions, the rotating field in the stator and rotating rotor remain in synchronism. Unlike with asynchronous machines, the difference slip between rotor and rotating field speed in stator is an indication of abnormal operation situation and must be dealt with immediately.
The synchronous speed ns [rpm] is given by equation (1) below:

The synchronous angular velocity ωs [rad/s] is given by equation (2):

Where
- f is the network frequency [Hz]
- p is the number of poles in the machine
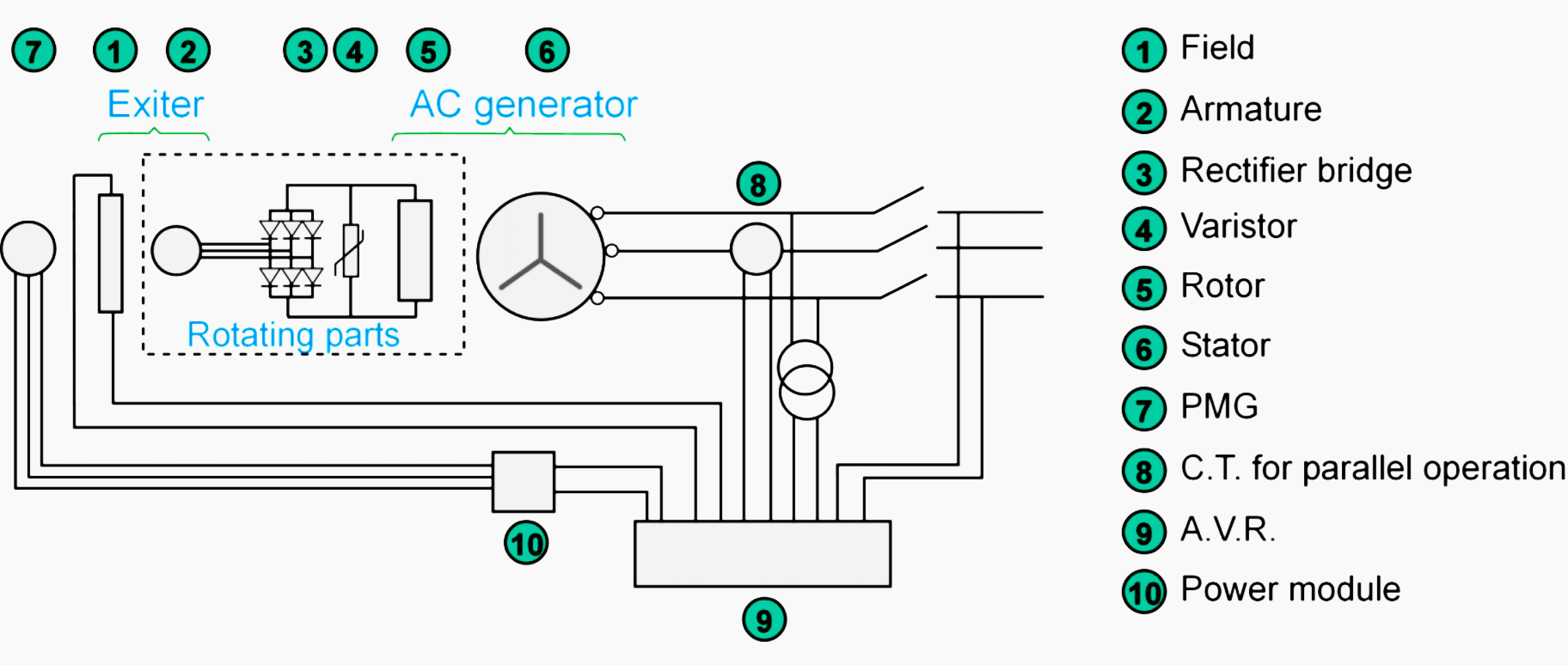
Some synchronous machines rely on brushes for delivering the DC current to the rotor for excitation. A more modern solution is the so-called brushless design, where the needed power is transferred to the rotor by induction and the rectifying takes place in the rotor itself.
For generating the power for excitation purposes, PMGs are commonly used. By the way, PMG stands for Permanent Magnet Generator. The PMG works as a pilot generator connected to the main generator’s shaft, supplying the power for the main generator’s excitation.
With a single synchronous machine running as generator, the control of the output voltage is carried out by controlling the excitation. Increased excitation current will result in a higher output voltage, and vice versa.
The frequency control of the output voltage is carried out by controlling the running speed of the prime mover.
This situation is referred to as “underexcitation ” and is not a normal operation mode of the generator.
The increase in prime mover’s torque cannot increase the rotation speed of the generator, since it is electrically coupled to the strong network. Instead, it increases the active power output of the generator. If the prime mover torque is decreased below the level of rotating losses of the generator, the generator starts to work as a motor trying to rotate the prime mover with the synchronous speed.
This situation is referred to as reverse power operation. The reverse power operation is harmful to the generator and also to the prime mover, thus the situation has to be recognized by the protection relays.
The following figure shows an example of synchronous generator’s capabilities and constructional limitations for operation under different conditions. A normal operation is carried out overexcited, injecting reactive and active power to the network.
When a synchronous generator is started, it is speeded up with the prime mover close to the network frequency and the excitation current is applied to reach the nominal terminal voltage.

After this, the automatic synchronizer takes over the actual network connection procedure. The synchronizer adjusts the excitation current so that the generator’s terminal voltage matches the network voltage. The synchronizer also checks the phasing and adjusts the prime mover speed to match the generator frequency with network frequency.
The construction of a synchronous generator and motor are basically identical, except regarding the external connections. The synchronous motor is not synchronized against the network in similar ways as with the synchronous generators.
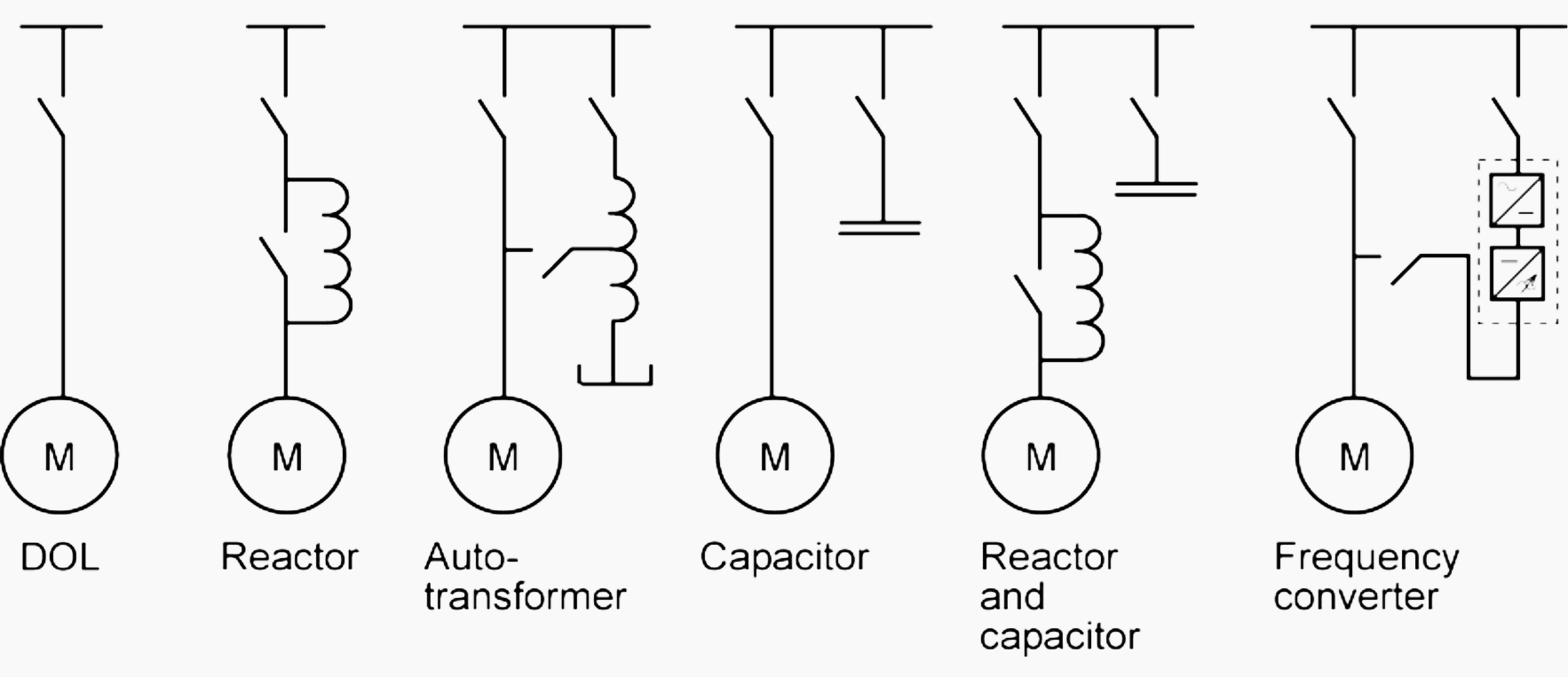
The simplest way to connect a synchronous motor to the network is the so-called Direct On-Line (DOL) starting, where the motor is started as an induction motor. The motor is “pulled” into the network with approximately 5% slip. Figure 5 describes other starting methods too.
The selection of the starting method depends on several criteria, like:
- Required load torque during starting sequence
- Voltage drop in the supplying network during starting
- Permitted starting time (thermal stress to rotor)
- Number of starts in a time period
The capability to control the reactive power output of a synchronous machine becomes a handy feature also in motor applications. By controlling the excitation of the synchronous motor, it is possible to compensate the variable reactive power needs in an industrial plant, thus minimizing the need of additional compensation devices.
Today, the synchronous condensers are replaced with SVC devices:
- Brushless synchronous machines
- Excitation / reactive power / voltage control
- Prime mover / active power / frequency control
- Permanent magnet motors (generators)
Synchronous generator excitation
Synchronisation of generators to a busbar
Reference // Distribution Automation Handbook by ABB
Related electrical guides & articles












Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi

Can anybody share protection & data signal transfer over PLCC panels.
Very nice!!! This website is very interesting for the Electrical Engineers. Congratulations!
Excellent. Thank you for bringing these up.
VERY GOOD !
The subjects which has delivered are too classic and can be found in books or … .l prefer to know some practical issues.The problems that take place in power plants.
Your sincerely.