
Estimated Study Time: 14 minutes
Motor selection for AC ASD
Important checks to consider in the motor selection for AC adjustable speed drive system:
 Practical checks for motor selection on AC adjustable speed drive systems
Practical checks for motor selection on AC adjustable speed drive systems- Determine motor enclosure requirements
- Determine motor torque and speed requirements:
- Determine accelerating and decelerating requirements (time and load)
- Overload
- Determine type of duty:
- Other considerations:
1. Determine motor enclosure requirements
Most often the environment dictates the motor enclosure selection. However, in the case of all ventilated motors, care must be taken to provide space for adequate ventilation.
Some examples of commonly available enclosures for non-hazardous locations are:
- Self-ventilated open dripproof (ODP) motors are not suited for environments containing significant amounts of air borne materials that could accumulate in the motor or chemicals that could damage motor internal parts and insulation.
- Totally enclosed fan cooled (TEFC) motors, with external self ventilation, are suited for most environments.
- Totally enclosed non-ventilated (TENV) motors do not use forced air for ventilation but rely on radiation and convection to the surrounding air. When available, they are suited for most environments except where significant amounts of air borne materials are present that could accumulate on the motor and insulate it.
- Totally-enclosed blower-ventilated motors are similar to TEFC except with a separate motor driving the cooling fan and can be use in similar environments.
- Open blower-ventilated motors are similar to ODP except with a separate motor driving the cooling fan and can be use in similar environments.
Hazardous Locations
WARNING // Motors operated from adjustable frequency controls should not be used in any Division 1 hazardous (classified) location unless the motor is identified on the nameplate as acceptable for adjustable frequency operation when used in Division 1 hazardous (classified) locations.
For motors to be used in any Division 2 hazardous (classified) locations, the motor manufacturer should be consulted.
2. Determine Motor Torque and Speed Requirements
Operating Speed Range
The desired speed range may be difficult to achieve depending on the type of application. In general, depending on motor size and load type, very wide ranges may require a special motor.
Operation at very low speeds, requiring the motor to run at very low frequency (below approximately 6 Hz) or very high speeds requiring the motor to run at very high frequencies (above 90 Hz) may require a special motor.
Motor synchronous speed varies directly with the control output frequency. Therefore, the frequency required to achieve a desired application speed can be approximated by dividing the desired speed by the motor rated speed and then multiplying by the rated frequency of the motor. If the minimum or maximum frequency are near or outside the limits mentioned above then the motor manufacturer should be consulted before proceeding.
Examples of speed ranges are listed below, expressed as a ratio of the motor base speed to a minimum speed.
| Constant and Variable Torque Speed Range Examples (Base speed = 2500 RPM) | ||
| Minimum speed (RPM) | % Motor Base Speed | Speed Range Ratio |
| 1250 | 50 | 2:1 |
| 625 | 25 | 4:1 |
| 250 | 10 | 10:1 |
| 125 | 5 | 20:1 |
| 25 | 1 | 100:1 |
Constant horsepower applications have a speed range where the base speed is the lowest speed not the top speed.
| Constant Horsepower Speed Range Examples (Base speed = 2500 RPM) | ||
| Minimum speed (RPM) | % Motor Base Speed | Speed Range Ratio |
| 3750 | 150 | 1.5:1 |
| 5000 | 200 | 2:1 |
| 7500 | 300 | 3:1 |
Note // These speed range examples are for illustration purposes only. Not all motors will be capable of operating within these ranges.
Breakaway Torque
The motor must have enough breakaway torque to start the load. This is not related to the motor locked rotor or starting torque published for across-the-line starting.
Breakaway torque is limited by the motor, the available current from the control, and by the setup of the control. If the static torque required to start the load moving is above 140 percent of motor full-load torque, an oversized control and a motor with sufficient torque capability may be required.
There are several techniques that can be used to achieve the required torque, within the capability of the components used. These techniques should be discussed with the motor manufacturer to achieve the optimum configuration.
3. Determine accelerating and decelerating requirements (time and load)
Once the load starts to move it must be accelerated to the desired operating speed. The motor must supply both the load torque during the acceleration plus enough torque to accelerate the inertia of the load within the desired time.
During acceleration, motor temperature increases as it does for any increased load. If acceleration time is an important consideration for an application, the required accelerating torque must be determined, added to the load torque, and compared to the available torque. It may be necessary to oversize the control or motor, to produce enough accelerating torque to meet the specified acceleration time.
It is necessary to know the specific acceleration time required, the reflected inertia at the motor shaft, the inertia of the motor, and the torque load on the motor during acceleration.
Use the following to calculate the required accelerating torque:
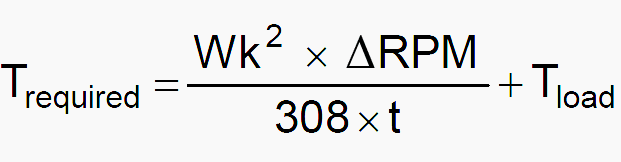
Where:
- Trequired = Torque to accelerate load (lb-ft)
- Tload = Load torque during acceleration. Use average torque for variable torque loads.
- Wk2 = Inertia of the load reflected to the motor plus the inertia of the motor rotor (lb-ft2)
- ΔRPM = Change in motor speed desired
- t = Time (seconds) required to accelerate motor
By knowing the accelerating torque required and how often the acceleration occurs, the proper motor and control can be selected. The motor must be capable of supplying the torque, by way of overload torque, and must have the cooling capacity to handle the frequency of these starts or overloads. The control must be capable of supplying the necessary current for the duration and frequency which it occurs.
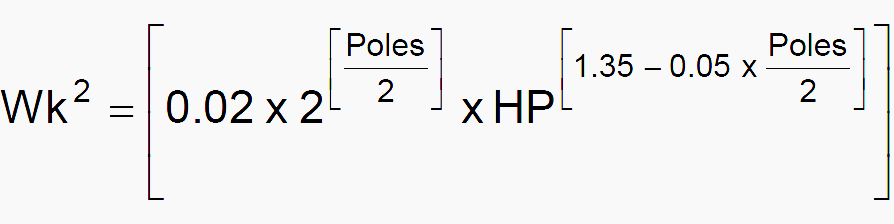
The rotor inertia (Wk2) in lb-ft2 for the application of medium AC induction motors with dynamic braking equipment may be estimated by the following formula:
4. Overload
Overload may be required to handle peak loads during a cycle of operation, emergency operation, to handle infrequent occurrences, or for load acceleration or speed changes. The effects of overload operation (above full-load torque) on motors is similar when operated on a control as when operated on utility power. Overload operation increases motor heating.
Overload torque is only available on an occasionally repeated basis.
5. Determine type of duty
Continuous process
A continuous process is one in which the motor starts and runs for long periods of time at various or a number of fixed speeds. Rapid speed changes, accelerations, or overloads requiring the motor to deliver more than full-load torque are infrequent.
General-purpose motors are designed originally for continuous operation at one frequency, typically 50 or 60 Hz. They also perform well within the manufacturers’ recommended speed range when operated on a control. Definite-purpose inverter-fed motors are available for extended speed ranges and more demanding applications.
Duty Cycles
Duty cycle applications are those in which motor starts, stops, and transitions between speeds or loads are common and are done frequently. Several aspects of this type of application affect the motor and the control.
a. The motor may also be off for portions of the cycle.
Normal cooling on self-ventilated motors is only achieved when the motor is rotating. With significantly less cooling when off, heat built up in the motor during operation will take longer to dissipate. Manufacturer assistance may be required to assure that there is adequate cooling for the desired duty cycle.
b. Torque demands above motor full-load torque may be required.
Operation above motor full load may be required to accelerate, handle peak loads, and even decelerate the load. Operation above motor rated current will increase motor heating.
c. DC injection, dynamic, or regenerative braking may be required to stop the motor.
Regardless of whether the motor is generating torque to drive the application, generating power back to the control due to the motor being driven by the load, or supplying torque during deceleration by applying DC current to the windings, motor heating takes place approximately proportional to the square of the current while applied.
This heating must be included in the duty cycle analysis.
6. Other considerations
Bypass (Across-the-Line Starting)
In applications where across-the-line motor starting (bypassing the control) is required, the motor, contactors, and wiring must be sized properly for both bypass operation and control operation.
Operating Frequency
Operation at various frequencies can affect the following motor characteristics:
- Cooling
- Low speed torque which may require voltage boost
- Overload
- Maximum safe operating speed
- Thermal considerations
- Sound and vibration
- Torsional considerations
Efficiency
The decision of whether or not to use a high efficiency motor is typically independent of the decision to use a control.
VFD introduction / application / information
A crash course on VFD’s and how to make a practical choice on drives and motors. Every application is going to have special needs and should be evaluated with the intended use in mind.
Reference // NEMA Standards Publication – Application Guide For AC Adjustable Speed Drive Systems by National Electrical Manufacturers Association
Related electrical guides & articles












Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi
