
Estimated Study Time: 15 minutes
Differential protection principles
Differential protection is very useful method of protection that can be applied to the protection of any network component, such as transformers, machines, busbars, lines and feeders. The differential relay compares the incoming phase currents of an object to the outgoing phase currents of the same object.
 Differential protection of transformers, machines, busbars, lines and feeders (photo credit: proenergo.net)
Differential protection of transformers, machines, busbars, lines and feeders (photo credit: proenergo.net)If these currents differ from each other as to the amplitude or phase angle or both more than allowed by the setting values of the relay, the relay will trip.
The measuring principle ensures that the relay operates exclusively on faults inside the area of protection, which means that the protection is absolutely selective.
Therefore the operating time of the protection is very short, typically shorter than one cycle. The area of protection is defined as the area between the current-measuring points.
According to their operating principles, the differential protection can be divided into following differential schemes:
Low-impedance differential principle
A low-impedance differential scheme measures the currents on either side of the protected object and forms from these a differential current Id , Figure 1. In practice, a small differential current, mainly caused by measuring errors of the current transformers and the relay, can be noticed even though there is no fault within the area of protection.
In transformer protection applications, a so-called apparent differential current like this is additionally caused by the no-load current of the transformer, the position of the tap changer and momentarily by the transformer inrush current, which fully appears as differential current.
The through-fault current is high and may contain a DC-component which may cause saturation of the current transformers resulting in a momentary increase in the differential current. To avoid a false operation of the differential relay, the relay must be stabilized, which means that the higher the through-fault current, the higher differential current is required for tripping.
The stabilizing current Ib is formed from the phase currents measured on both sides of the protected object.
Operating characteristic of a stabilized differential relay
An example of the operating characteristic of a stabilized differential relay is shown in Figure 1. The shape of the characteristic is defined by the basic setting, starting ratio and the second turning point, Figure 1.
For stabilizing current values greater than the second turning point, the starting ratio is fixed.

As the name implies, the basic setting defines the basic sensitivity of the relay under no-load conditions of the protected object.
The basic setting must be higher than, for example, the transformer excitation current or the line-charging current at maximum operating voltage to avoid a false operation of the relay. The basic setting also affects the level of the entire characteristic curve and thus also the operating sensitivity at higher stabilizing current levels.
The starting ratio caters for the sources of the apparent differential current, which are directly proportional to the through-flowing current. It is mainly the starting ratio together with the second turning point that determines the operating sensitivity of the relay for internal transformer or machine faults when these objects are loaded.
The second turning point also affects the stability of the protection at faults outside the area of protection.
In this situation, the relay must not operate incorrectly and trip the circuit breaker under the influence of the apparent differential current. The lower the setting of the second turning point, the better the stability obtained will be. On the other hand, the sensitivity of the relay for internal faults may be decreased in the same time, particularly in the transformer protection applications. By taking notice of the accuracy limit factors of the CTs, the fault current levels and their supply directions and the sensitivity requirements of the protected object, the setting of the second turning point is in general easily found.
At stabilizing current levels above the second turning point, the high starting ratio secures stability at faults arising outside the area of protection.
Stability problems
Stability problems may be caused by switching inrush currents. When a protected power transformer is energized, the inrush current fully appears as differential current, in which case the stabilization of the relay alone is not enough to prevent false relay operations.
This situation calls for a blocking function based on the second harmonic to inhibit the operation of the stabilized stage. The second harmonic is typically abundantly present in the inrush current.
Problems may also arise when the transformer inrush current fed by the protected generator is fairly high compared to the rated current. In these cases, the unsymmetrical phase currents containing second harmonics may cause non-simultaneous saturation of the current transformers and thus apparent differential current for the relay.
To secure the operation of the relay under these circumstances, the activation of the second harmonic-based blocking function is often justifiable.
In transformer protection applications, the stability is also endangered by a temporary overvoltage. The increasing voltage generates a growing magnetizing current because of the saturation of the transformer, which is fully seen as differential current.
When the ratio between the differential current and the stabilizing current exceeds the settings, the relay operates. The operation can be inhibited by incorporating a blocking function based on the fifth harmonic.
The magnetizing current of a saturated power transformer contains a great deal of this particular harmonic. If the overvoltage situation becomes worse, the proportion of the fifth harmonic typically grows up to a certain knee point level. At this point it may be appropriate to remove the blocking and to enable the relay to operate in order to prevent too excessive overexcitation of the transformer. This can be done with the release function of the fifth harmonic-based blocking.
For a fast and dependable operation of the high-set stage, the accuracy limit factor of the current transformers used in the protection must be high enough. This will also prevent the unnecessary operation of the second harmonic blocking function and in this way additional delay in operation of the stabilized stage can be prevented.
On the one hand, a sufficient similarity in the accuracy limit factors of the current transformers used in the protection further assures that the relay maintains its stability at faults outside the area of protection.
High-impedance differential principle
Thanks to its operating principle, the high-impedance differential scheme is particularly easy to implement and set and has a high operational reliability, Figure 2. The stabilization of the high-impedance scheme is performed by a separate stabilizing resistor.
As the name implies, this resistor is employed for the prevention of false relay operations on faults outside the area of protection. Such operations may be caused by the differential current arising from non-simultaneous saturation of the current transformers.
Because the current transformer circuits are galvanically interconnected, all the current transformers of the protection should have the same turns ratio!
The use of intermediate current transformers is not recommended as this increases the requirements set on the main current transformers and lowers the sensitivity of the protection. The high-impedance principle is particularly well suited for the short-circuit protection of machines, short lines and busbar systems and the earth-fault protection of these and transformers in effectively earthed and low-impedance-earthed networks.
Because the impedance of the saturated current transformer is low, a high resistance, that is, the stabilizing resistor, is connected in series with the relay circuit.
Now the entire differential current is forced to flow through the secondary circuit of the saturated current transformer, which can be described by short-circuiting the magnetizing reactance X E in Figure 2.
The voltage drop formed over the secondary circuit will then be the same as that over the relay circuit, Figure 2. This stabilizing voltage must not cause a relay operation.
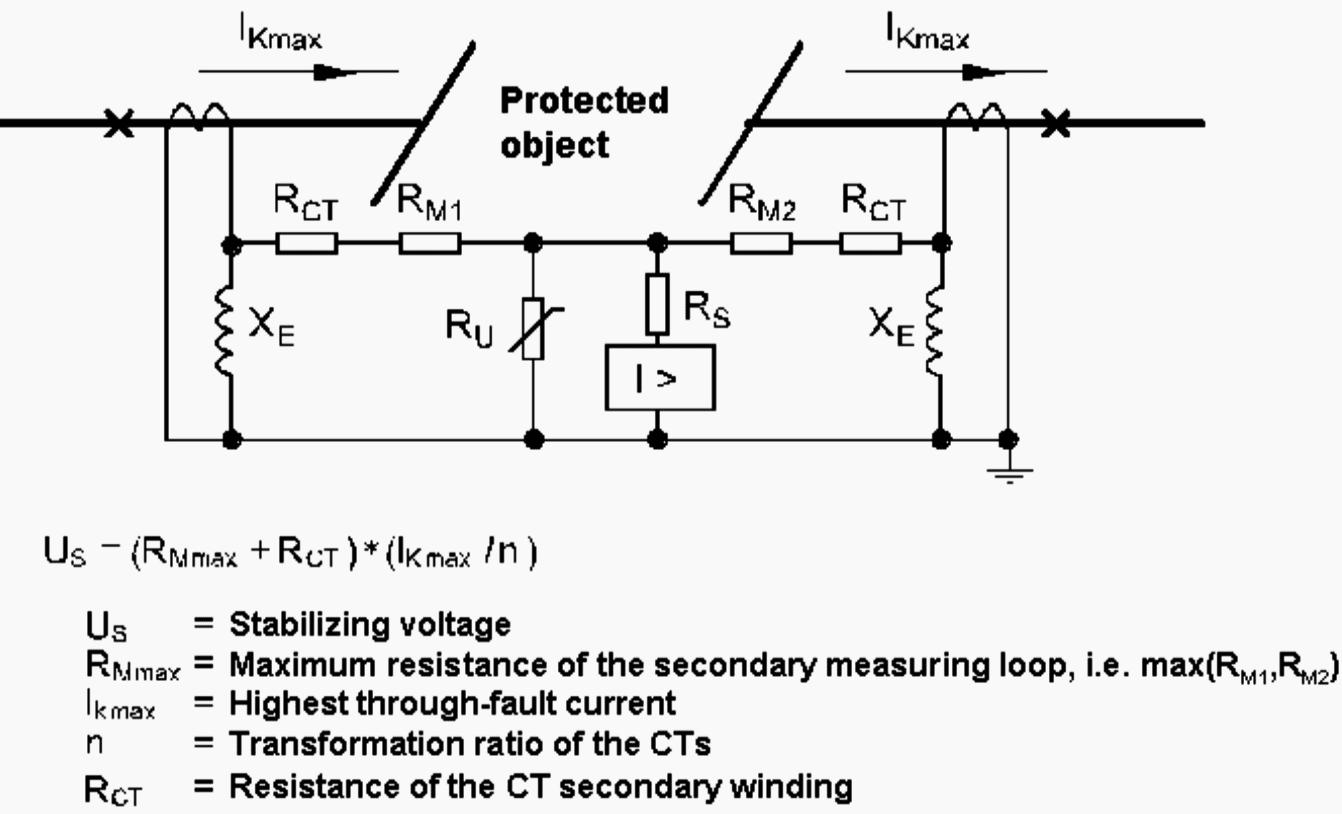
Where:
- RS is stabilizing resistor,
- RU is voltage dependent resistor (varistor).
When the protection is implemented using a voltage relay, the selected setting must be equal to or exceed the calculated stabilizing voltage. The value of the stabilizing resistor is determined according to this voltage setting. In case of a voltage relay, the stabilizing resistor is often integrated into the relay.
By means of the stabilizing voltage and the current setting, the value of the stabilizing resistor is obtained. Typically in case of a current relay the stabilizing resistor must be separately installed and connected to the relay circuit.
On faults inside the area of protection, the current transformers attempt to feed a secondary current proportional to the short-circuit current through the relay. But because the impedance of the relay circuit is high, the secondary voltage may exceed the ratings of the relay and the secondary wiring.
For this reason, a voltage-dependent resistor is to be connected in parallel with the relay in order to limit the voltage to a safe level.
The influence of CT saturation on differential protection schemes
The current transformers used in the high-impedance protection applications must have an adequate accuracy limit factor to be capable of supplying enough current to the relaying circuit on faults inside the area of protection. This requirement is fulfilled if the knee point voltage of the current transformers is at least twice the chosen stabilizing voltage.
The protection requires class X or PX current transformers according to BS 3938 or IEC 60044-1 respectively, the repetition capability of which is determined by the knee point voltage and the resistance of the secondary circuit. In the specification of the class X or PX CTs, the magnetizing current corresponding to the knee point voltage is also given. This current value is needed for the calculation of the overall sensitivity of the protection.
Reference // Distribution Automation Handbook – Relay Coordination by ABB
Related electrical guides & articles










Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi

i have a question about the busbar diffirence protection, when the first energy supply for transformer new that occur trip busbar diff. protection, but our not find cause of fault. please help me discuss it. that may be Influence of current transformers saturation?
thanks and best regards.
Thank you so much for the membership
You’re welcome Balone, I’m glad you find it usefull!
I have question on generating station differential protection schemes specially overlapping zone protection from generator neutral to the breaker on the high side of the GSU transformer – 87U. If this relay is used on a 400 MW Gas turbine generator(26kV) with a GSU high side voltage of 345 kV, is there any regulatory requirement for redundant 87U relays,? I am referring to either NERC, FERC, PRC-00X, if not, why it would be a good idea to have a redundant differential unit protection at that voltage level?.
Pls send the setting of industrial relay for motor,genrator,busbar,transformer.