
Estimated Study Time: 14 minutes
Electrical characteristics of the motor
Electrical characteristics like voltage, frequency and phase of power supply should be consistent with the motor nameplate rating. A motor will operate satisfactorily on voltage within 10% of nameplate value, or frequency within 5%, or combined voltage and frequency variation not to exceed 10%.
 17 electrical characteristics of the motor you should know (on photo: Delco Remanufactured Electric Motor 1.5 HP 1760 RPM)
17 electrical characteristics of the motor you should know (on photo: Delco Remanufactured Electric Motor 1.5 HP 1760 RPM)Table of Contents:
- Voltage
- Phase
- Current (Amps)
- Hertz / Frequency
- Horsepower
- Speeds
- Insulation Class
- Service Factor
- Capacitors
- Efficiency
- Encoders
- Thermal Protection (Overload)
- Shaft Grounding Devices
- Torque Speed Characteristics
1. Voltage
Common 60 hz voltages for single-phase motors are 115 volt, 230 volt, and 115/230 volt. Common 60 hz voltage for three-phase motors are 230 volt, 460 volt and 230/460 volt. Two hundred volt and 575 volt motors are sometimes encountered.
In prior NEMA standards these voltages were listed as 208 or 220/440 or 550 volts.
Motors rated 115/208-230 volt and 208-230/460 volt, in most cases, will operate satisfactorily at 208 volts, but the torque will be 20% – 25% lower. Operating below 208 volts may require a 208 volt (or 200 volt) motor or the use of the next higher horsepower, standard voltage motor.
Go back to Motor Electrical Characteristics ↑
2. Phase
Single-phase motors account for up to 80% of the motors used in the United States but are used mostly in homes and in auxiliary low-horse power industrial applications such as fans and on farms.
Three-phase motors are generally used on larger commercial and industrial equipment.
Go back to Motor Electrical Characteristics ↑
3. Current (Amps)
In comparing motor types, the full load amps and/or service factor amps are key parameters for determining the proper loading on the motor. For example, never replace a PSC type motor (Permanent Split Capacitor) with a shaded pole type as the latter’s amps will normally be 50% – 60% higher.
Compare PSC with PSC, capacitor start with capacitor start, and so forth.
Go back to Motor Electrical Characteristics ↑
4. Hertz / Frequency
In North America 60 hz (cycles) is the common power source. However, most of the rest of the world is supplied with 50 hz power.
Go back to Motor Electrical Characteristics ↑
5. Horsepower
Exactly 746 watts of electrical power will produce 1 HP if a motor could operate at 100% efficiency, but of course no motor is 100% efficient. A 1 HP motor operating at 84% efficiency will have a total watt consumption of 888 watts. This amounts to 746 watts of usable power and 142 watts loss due to heat, friction, etc. (888 × 0.84 = 746 = 1 HP).
Horsepower can also be calculated if torque is known, using one of these formulas:
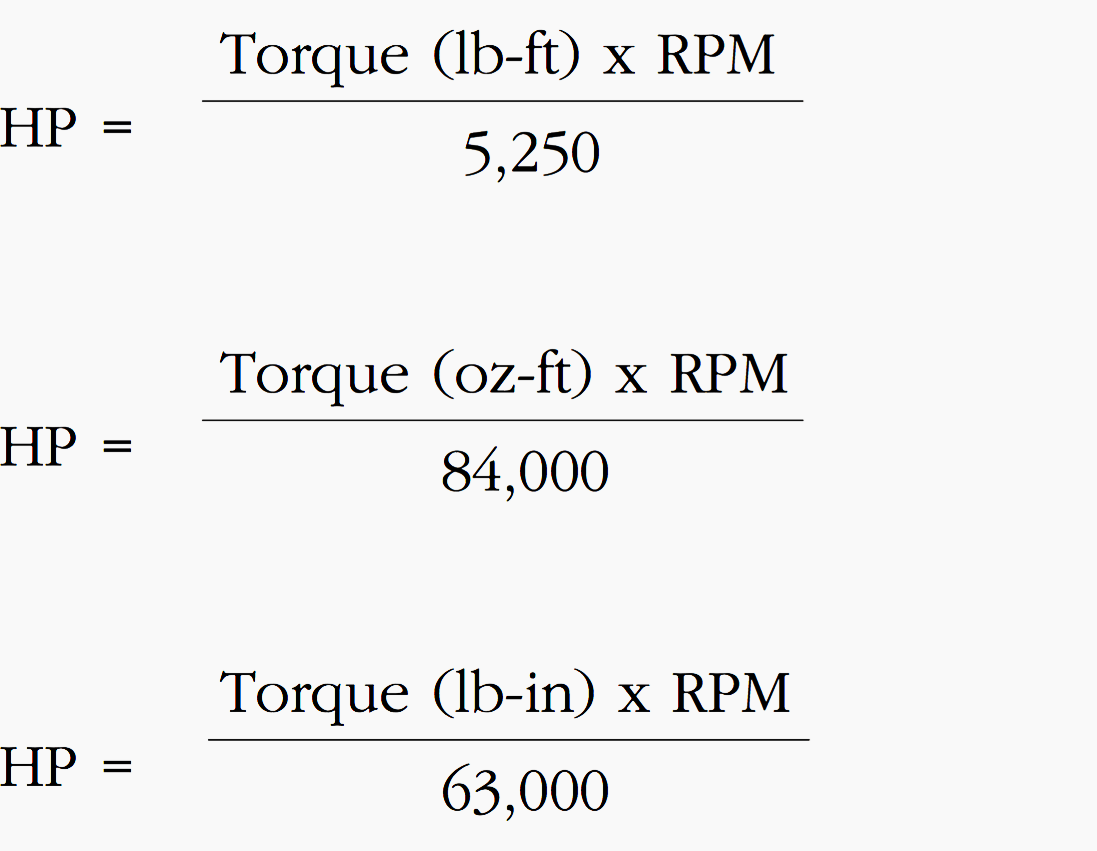
Go back to Motor Electrical Characteristics ↑
6. Speeds
The approximate RPM at rated load for small and medium motors operating at 60 hz and 50 hz at rated volts are as follows:
| Motor type | 60 Hz | 50Hz | Synchronous speed |
| 2 pole motor | 3450 | 2850 | 3600 |
| 4 pole motor | 1725 | 1425 | 1800 |
| 6 pole motor | 1140 | 950 | 1200 |
| 8 pole motor | 850 | 700 | 900 |
Synchronous speed (no-load) can be determined by this formula:

Go back to Motor Electrical Characteristics ↑
7. Insulation Class
Insulation systems are rated by standard NEMA classifications according to maximum allowable operating temperatures. They are as follows:
| Class | Max. allowed temperature |
| A | 105°C (221°F) |
| B | 130°C (266°F) |
| F | 155°C (311°F) |
| H | 180°C (356°F) |
* Motor temperature rise plus maximum ambient
Generally, replace a motor with one having an equal or higher insulation class. Replacement with one of lower temperature rating could result in premature failure of the motor. Each 10°C rise above these ratings can reduce the motor’s service life by one half.
Go back to Motor Electrical Characteristics ↑
8. Service Factor
The service factor (SF) is a measure of continuous overload capacity at which a motor can operate without overload or damage, provided the other design parameters such as rated voltage, frequency and ambient temperature are within norms.
Example: A 3/4 HP motor with a 1.15 SF can operate at 0.86 HP, (0.75 HP × 1.15 = 0.862 HP) without overheating or otherwise damaging the motor if rated voltage and frequency are supplied at the motor’s leads. Some motors have higher service factors than the NEMA standard.
Always make certain that the replacement motor has a maximum HP rating (rated HP x SF) equal to or higher than that which it replaces. Multiply the horsepower by the service factor for maximum potential loading.
For easy reference, standard NEMA service factors for various horsepower motors and motor speeds are shown in this table.
| For DRIP PROOF MOTORS Service Factor Synchronous Speed (RPM) | ||||
| HP | 3600 | 1800 | 1200 | 900 |
| 1/6, 1/4. 1/3 | 1.35 | 1.35 | 1.35 | 1.35 |
| 1/2 | 1.25 | 1.25 | 1.25 | 1.25 |
| 3/4 | 1.25 | 1.25 | 1.15 | 1.15 |
| 1 | 1.25 | 1.15 | 1.15 | 1.15 |
| 1 1/2 up | 1.15 | 1.15 | 1.15 | 1.15 |
The NEMA service factor for totally enclosed motors is 1.0. However, many manufacturers build TEFC with a 1.15 service factor.
Go back to Motor Electrical Characteristics ↑
9. Capacitors
Capacitors are used on all fractional HP induction motors except shaded-pole, split-phase and polyphase. Start capacitors are designed to stay in circuit a very short time (3-5 seconds), while run capacitors are permanently in circuit. Capacitors are rated by capacity and voltage.
Never use a capacitor with a voltage less than that recommended with the replacement motor! A higher voltage is acceptable.
Go back to Motor Electrical Characteristics ↑
10. Efficiency
A motor’s efficiency is a measurement of useful work produced by the motor versus the energy it consumes (heat and friction). An 84% efficient motor with a total watt draw of 400W produces 336 watts of useful energy (400 × 0.84 = 336W).
The 64 watts lost (400 – 336 = 64W) becomes heat.
Go back to Motor Electrical Characteristics ↑
11. Encoders
Encoders are devices that translate a signal, whether motion into position or velocity feedback for a motion control system. Take a conveyor system as an application. You want to run the conveyor at 100 feet per minute. The motor that powers this conveyor has an encoder mounted to its shaft.
If the load on the conveyor changes, like it is being overloaded due to additional weight of product added to the conveyor, the controller should notice a change in pulses from the encoder, for the speed of the conveyor slows down from this additional weight, and the controller will send a signal to the motor to speed up to compensate for this load change.
Once the load has been returned to the standard expected load, the control will again see a signal from the encoder and will slow the motor down to the needed speed.
There are two main types of Encoders, Rotary and Linear and each type can use different sensing technologies. They include Optical, Magnetic or Inductive. Optical Rotary encoders are the most common type used.
Go back to Motor Electrical Characteristics ↑
12. Thermal Protection (Overload)
A thermal protector, automatic or manual, mounted in the end frame or on a winding, is designed to prevent a motor from getting too hot, causing possible fire or damage to the motor. Protectors are generally current and temperature sensitive. Some motors have no inherent protector, but they should have protection provided in the overall system’s design for safety.
Never replace nor choose an automatic-reset thermal overload protected motor for an application where the driven load could cause personal injury if the motor should restart unexpectedly. Only manual-reset thermal overloads should be used in such applications.
Basic types of overload protectors include:
- Automatic Reset: After the motor cools, this line-interrupting protector automatically restores power. It should not be used where unexpected restarting would be hazardous.
- Manual Reset: This line-interrupting protector has an external button that must be pushed to restore power to the motor. Use where unexpected restarting would be hazardous, as on saws, conveyors, compressors and other machinery.
- Resistance Temperature Detectors: Precision-calibrated resistors are mounted in the motor and are used in conjunction with an instrument supplied by the customer to detect high temperatures.
Go back to Motor Electrical Characteristics ↑
13. Shaft Grounding Devices
Shaft grounding is recommended (NEMA MG1 31.4.4.3) as an effective means of bearing protection for motors operated from inverter power. Shaft voltage occurs in motors powered by variable frequency inverters (VFD). These VFDs induce shaft voltages onto the shaft of the driven motor because of the extremely high speed switching of the insulated gate bipolar transistors (IGBTs) which produce the pulse width modulation used to control AC motors.
One grounding device is adequate to bleed down inverter-sourced shaft voltages, thereby protecting both bearings for motors as large as 6085 frame.
There are four common techniques that can minimize or eliminate this bearing damage caused by these ground currents:
- Faraday shield,
- Insulated bearings or ceramic bearings,
- Ground brush or
- Grounding ring
Shielding the cable or wire between the motor and the VFD can also significantly improve these spikes as well.
Go back to Motor Electrical Characteristics ↑
13.1 Faraday Shield
An electrostatic shielded induction motor (ESIM) is one approach to the shaft-voltage problem, as the insulation reduces voltage levels below the dielectric breakdown.
Go back to Motor Electrical Characteristics ↑
13.2 Grounding Brush
Grounding the shaft by installing a grounding device provides an alternate low-impedance path from the motor shaft to the motor case. This channels the current away from the bearings.
It significantly reduces shaft voltage, and therefore bearing current, by no allowing voltage to build up on the rotor.
Go back to Motor Electrical Characteristics ↑
13.3 Shaft Grounding Ring
A shaft grounding ring (SGR) is similar to a grounding brush, except that this brush makes use of conductive micro fibers, creating a low impedance path from the motor.
Go back to Motor Electrical Characteristics ↑
13.4 Insulated Bearings
Insulated or ceramic bearings eliminate the path to ground through the bearing for current to flow.
Go back to Motor Electrical Characteristics ↑
14. Torque-speed Characteristics of Motors
The amount of torque produced by a motor generally varies with speed. This Torque-Speed characteristic depends on the type and design of a motor, and is often shown on a Torque-Speed graph.
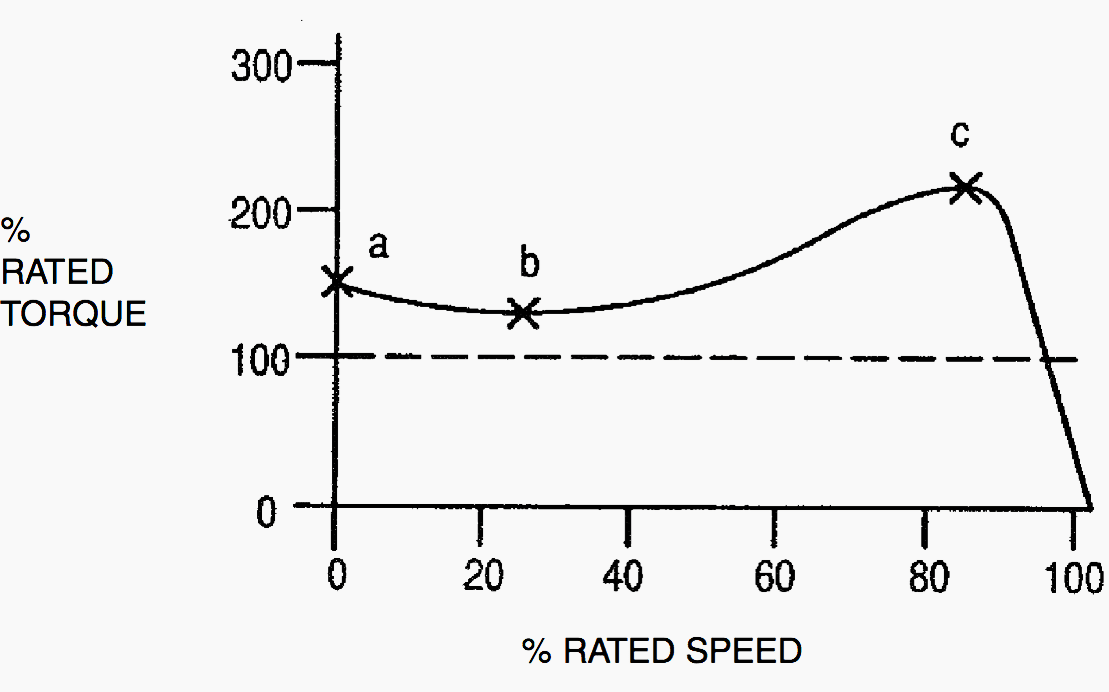
Some important factors indicated by the graph include:
- Starting torque – the torque produced at zero speed
- Pull-up torque – the minimum torque produced during acceleration from standstill to operating speed
- Breakdown torque – the maximum torque that the motor can produce before stalling
Go back to Motor Electrical Characteristics ↑
Reference // Basic training for industrial-duty and commercial-duty products by LEESON
Related electrical guides & articles












Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi

Test of equilibrium of the rotor, of the fun, ….also.
Very useful information, after reading through, i realized where i was lacking
Dear sir
6. Speeds
The approximate RPM at rated load for small and medium motors operating at 60 hz and 50 hz at rated volts are as follows:
Motor type 60 Hz 50Hz Synchronous speed
2 pole motor 3450 2850 3600
4 pole motor 1725 1425 1800
6 pole motor 1140 950 1200
8 pole motor 850 700 900
Synchronous speed (no-load) can be determined by this formula:
(frequency x 120)/no of pole
how you calculate 3600rpm for two pole
This information you providing is very useful, I wish could be able to download. Am a electrical technician by professional. It’s really interesting
Odusevljen sam svakim izdanjem EEP a posebno ovim o 14 vaznih karakteristika motora
Hvala puno/Thanks a lot
THKS FOR THE ARTICLE. BUT U GOT A ERROR HERE:
Automatic Reset: After the motor cools,
CHECK
Thank you Edvard!
Nema na cemu Dragane!
Great article! I happen to find that some one phase motors coming from China requiere a neutral and a phase from a 460 volts. Not sure if it is because of their voltage system. It was somewhat confusing…
Nice information packaged well, you might want to extend the discussion to 690vac motors which are becoming while small in overall number predominate in both the wind and solar market in North America. It might also be beneficial to expand into discussion on the new North American Efficiency standards on motors. Those items would make the details even better than it is at present.
nice information
hi
thanks for good guide
You guys are doing a great job! Keep the good work going. Thumbs up from Pakistan!
ADD TYPE OF FRAME,TYPE OF COOLING, MAX INERTIA, AND SO ON.
THANKS
GOD BLESS