
Estimated Study Time: 15 minutes
Motor nameplate details
We have all seen the motor nameplate attached on the motor side (or on top). All motors have a permanent nameplate which lists all important data, further data is usually available in the motor catalogue. It is important to recognize that after long-term use, it can often be difficult to identify a motor’s operational data due to the common loss or obscuration of nameplates.
 What details a motor nameplate shows and how to use them (photo credit: eng-tips.com)
What details a motor nameplate shows and how to use them (photo credit: eng-tips.com)Example of the Motor Nameplate
The nameplate for a two-pole 15 kW motor may have the following important data:
Figure 1 – The motor nameplate
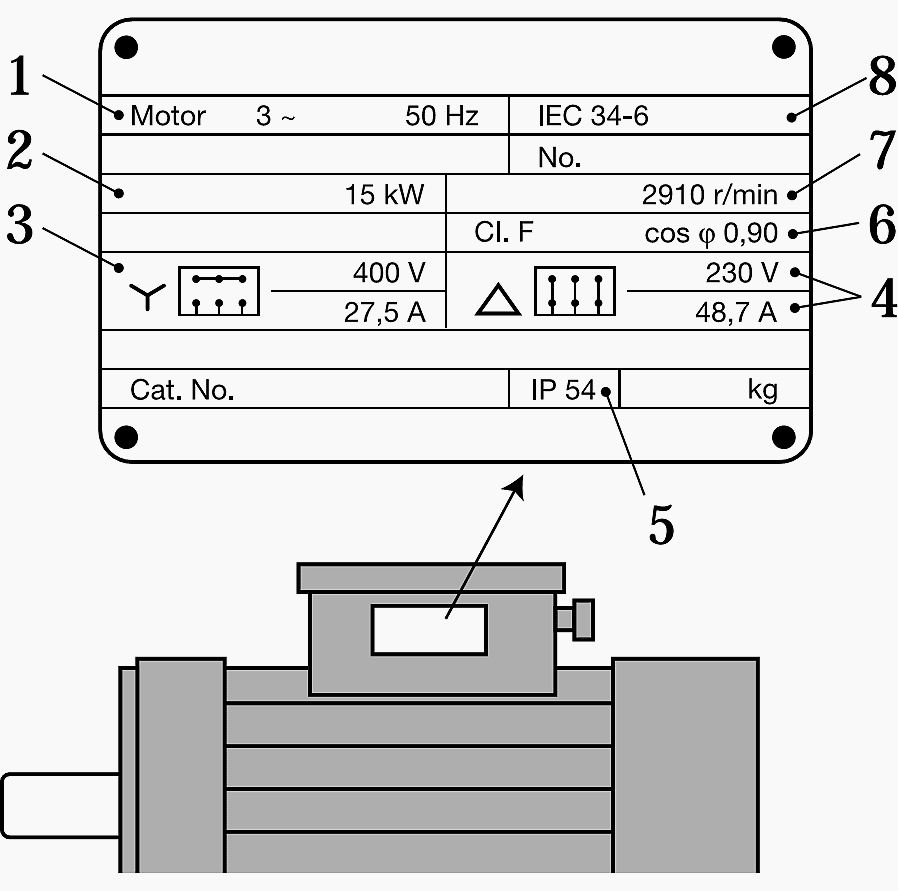
Data #1
The motor has three phases and is for a mains supply with a frequency of 50 Hz.
Data #2
The rated output of the motor is 15 kW, i.e. the motor is able to supply a shaft output of at least 15 kW if connected to the mains supply as indicated. The rated output of the asynchronous motor has been written into a standard. This allows the user a free choice of the different motor makes for various applications.
The standard series has output levels such as displayed in Table 1 below:
Table 1 – Motor output series
| kW | 0.06 | 0.09 | 0.12 | 0.18 | 0.25 | 0.37 | 0.55 | 0.75 | 1.1 | 1.50 | 2.20 | 3.00 |
| kW | 4.00 | 5.50 | 7.50 | 11.0 | 15.0 | 18.5 | 22.0 | 30.0 | 37.0 | 45.0 | 55.0 | 75.0 |
Horsepower (HP) is not now a commonly used unit for measuring motor output and it can be converted as follows:
1 HP = 0.736 kW
Further Study – Mastering schematic drawings: Analyzing seal-in contacts in motor control circuits
Mastering schematic drawings: Analyzing seal-in contacts in motor control circuits
Data #3 and #4
The stator windings can be connected in a “star” or “delta” formation. If the mains voltage is 400 V, the windings must be connected in a “star” formation. The motor current is then 27.5 A per phase. If the mains voltage is 230 V, the windings must be connected in a “delta” formation. The motor current is then 48.7 A per phase.
This has led supply companies to issue regulations ordering the start-up current of large motors to be reduced. This can be achieved by, for example, having the motor start up in a star connection and subsequently switching to a delta connection.
Figure 2 – Motor torque and current in star (γ) and delta (∆) connections
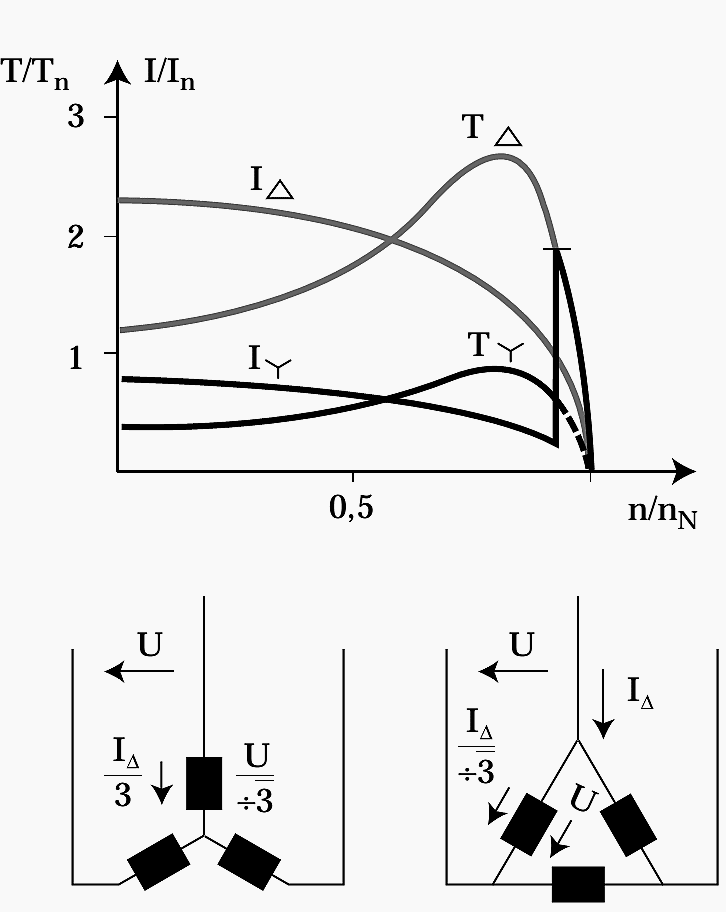
With the star connection power and torque are reduced to 1/3rd, and the motor cannot start at full load. A motor designed for star connection will be overloaded if there is no switch-over to star connection for full-load operation.
The slower the motor operates the more torque it must produce to deliver the same power output. To withstand the greater torque, lower speed motors need stronger components and are generally larger, heavier and more expensive than those of higher speed motors of the same power rating.
A final example is a 3 HP table saw motor. Shoving a piece of wood into the spinning blade will barely slow the motor down as the motor combines both speed and torque for the application.
Data #5
The motor protection rating indicates the degree of protection provided by the motor enclosure against the penetration of liquids and foreign bodies. Designations used are described in the international standard IEC Publication 34-5 (Degrees of protection provided by the integral design of rotating electrical machines (IP code) – Classification).
This part of IEC 60034 applies to the classification of degrees of protection provided by enclosures for rotating electrical machines.
The basic layout of the IP code is as follows:
IP 2 3 C S
Where:
- IP – Code letters
- 2 – first digit (from 0-6) contact and foreign bodies protection
- 3 – second digit (from 0-8) water protection
- C – supplementary letter A, B, C, D (optional)
- S – complementary letter H, M, S, W (optional)
You should also note that:
- If a digit does not have to be stated, it can be replaced by the letter “X”.
- Supplementary and/or complementary letters can be removed without being replaced by anything else.
- If more than one complementary letter is required, the alphabetical sequence must be followed
Figure 3 – Listing of the protection of motors under IEC 34-5
| Digit | First digit | Second digit | |
| Contact protection | Foreign body protection | Water protection | |
| 0 | No protection | No protection | No protection |
| 1 | Protection against contact with the back of the hand | Protection against solid foreign bodies with 50 mm dia. | Protection against vertically dripping water |
| 2 | Protection against contact with the fingers | Protection against solid bodies 12.5 mm dia. | Protection against water dripping at a slope (15°) |
| 3 | Protection against contact with tools | Protection against solid foreign bodies 2.5 mm dia. | Protection against water sprayed to an angle of 60° |
| 4 | Protection against contact with a wire | Protection against solid foreign bodies 1 mm dia. | Protection against water sprayed from all directions |
| 5 | Protection against contact with a wire | Dust protection | Protection against beamed water |
| 6 | Protection against contact with a wire | Dust protection | Protection against strongly beamed water |
| 7 | – | – | Protection against temporary sub-mersion in water |
| 8 | – | – | Protection against permanent sub-mersion in water |
Optional supplementary letter
The optional supplementary letter indicates that people are protected against access to hazardous components:
- Back of hand: Letter A
- Finger: Letter B
- Tools: Letter C
- Wire: Letter D
The optional complementary letter indicates that operating plant is protected and provides complementary information especially on:
- High-voltage units: Letter H
- Water test during operation: Letter M
- Water test during standstill: Letter S
- Weather conditions: Letter W
In case of operating plant protected against dust (first digit is 5), dust penetration is not completely prevented; however, dust is only allowed to enter in limited quantities and the unit will continue to operate without interfering with safety.
An operating unit with the designation IPX7 (temporary submersion) or IPX8 (permanent submersion) need not necessary also comply with the requirements concerning protection against water jets IPX5 or strong jets of water IPX6. If both equirements are to be fulfilled, the operating unit must be given a double designation to cover both, e.g. IPX5/IPX7.
Example // IP 65 says that the motor is contact-safe and holds tight against dust and water jets.
Data #6
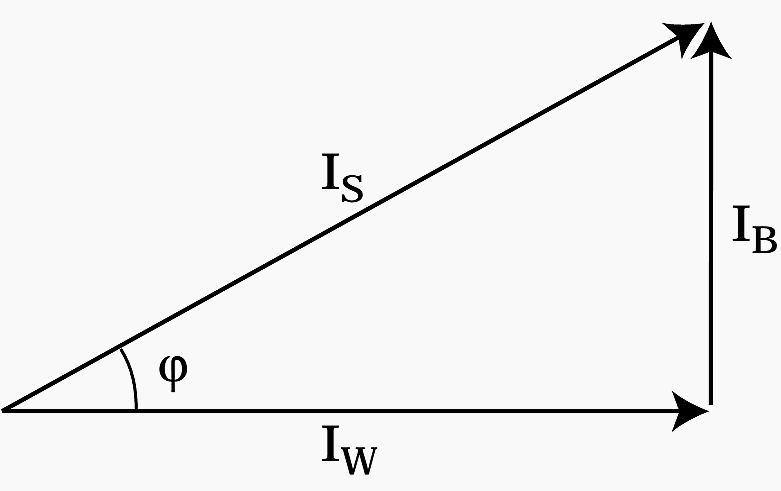
The rated current Is, which the motor takes up, is called apparent current and can be divided into two: an active current Iw and a reactive current IB. Cosϕ indicates the share of the active current as a percentage of the motor current at rated operation. The active current is converted into shaft output, while the reactive current indicates the power required to build up the magnetic field in the motor.
When the magnetic field is subsequently removed, the magnetising power will be fed back to the mains supply. The word “reactive” indicates that the current moves to and from the wires without contributing to the shaft output.
The size of this displacement depends on the frequency of the supply network. At a frequency of 50 Hz, the displacement between the current is 5 milliseconds. A geometrical summation is thus required:
![]()
The currents can be seen as the sides of a right-angled triangle, where the long side equals the square root of the sum of the short sides squared (following Pythagoras’s geometry).
ϕ is the angle between the apparent current and the active current and cosϕ is the ratio between the size of the two currents:

cosϕ can also be shown as the ratio between the actual output P and the apparent output S:

The phrase “apparent power” means that only part of the apparent current generates power, i.e. the part termed Iw, the active current.
Watch Video – Motor direct control
Data #7
The rated speed of the motor is the motor speed at rated voltage, rated frequency and rated load.
Data #8
Electric motors are designed for different types of cooling. Normally the cooling method is stated in accordance with international standard IEC Publication 34-6. Figure 5 shows the designations of this standard and IC stands for International Cooling.

Motor selection must be determined by the application as well as the installation. The international standard IEC 34-7 gives the mounting type of the motor in the form of two letters, IM (International Mounting) and four digits. Figure 6 shows some of the most common designs.
Using the data from the motor nameplate, other motor data can be calculated for example, the rated torque of the motor can be calculated from the following formula:


The efficiency η of the motor can be determined as the ratio between the power rating and the electrical input power:

The motor slip can be calculated, since the nameplate gives the rated speed and frequency. These two data items indicate a twopole motor which has a synchronous speed of 3,000 rpm. The slip speed (ns) is thus 3,000-2,910 = 90 rpm.
The slip is normally stated as a percentage:

Of course the motor catalogue contains some of the nameplate data. In addition other data is given as well:

Shaft output, speed, cosϕ and motor current can be taken from the nameplate. Efficiency and torque can be calculated on the basis of the nameplate information. Furthermore, the motor catalogue says that the starting current of the 15 kW motor, Ia, is 6.2 times higher than the rated current, IN.
Ia = 29 × 6.2 = 180 A
The starting torque of the motor (Ta) is stated to be 1.8 times the rated torque Ta= 1.8 ×49 = 88 Nm. This starting torque requires a starting current of 180 A. The maximum torque of the motor, the stalling torque (Tk) is twice the size of the rated torque:
Tk = 2 × 49 = 98 Nm

Finally, the moment of inertia and the weight of the motor are stated on the motor nameplate. The moment of inertia is used for calculating the acceleration torque. The weight may be of significance in connection with transportation and installation.
Some motor manufacturers do not publish the moment of inertia, and use the flywheel effect WR2 instead. However, this value can be converted as follows:
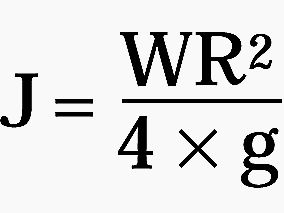
Where:
- g is the acceleration due to gravity
- The unit for the flywheel effect WR2 is [Nm2]
- The unit for the moment of inertia J is [kgm2]
Watch Video – Star-Delta motor starter circuit
Reference: Fact Worth Knowing About Frequency Converters by Danfoss
Related electrical guides & articles












Edvard Csanyi
Hi, I'm an electrical engineer, programmer and founder of EEP - Electrical Engineering Portal. I worked twelve years at Schneider Electric in the position of technical support for low- and medium-voltage projects and the design of busbar trunking systems.I'm highly specialized in the design of LV/MV switchgear and low-voltage, high-power busbar trunking (<6300A) in substations, commercial buildings and industry facilities. I'm also a professional in AutoCAD programming.
Profile: Edvard Csanyi

Very informative.
Just in case someone’s calculations aren’t adding up, there’s a typo. 1HP = 745.7 W ~ .746 kW.
you are good
1. 15.5 kw motor with speed of 1445 and a 15 kw motor with speed of 1460 which one is higher? and why??
Dear sir ,
Please what is this (IC 611, IM 1001) in motor nameplate .fu details plz
Thanks
I used to visit EEP portal at intervals and go through several topics also.Today while going through a topic on motor and its energy & power etc it is noticed that IP protection the expansion of IP given as International Protection.Actually IP stands for INGRESS PROTECTION.
A great effort and informative .I think Data 5 in Motor Name plate must be Ingress protection(IP) instead of International protection.Thanks
Very useful and detailed information. Thank you
I have to replace a Toshiba motor model number TC 4060L 163837. My location is Brooklyn NY 11245. Can you advise of local distributor?
Mr Edvard, to be candid in my excitement, since I liked this page the material so far has enriched my life career wise, I basically logs into my Facebook account just to eat from your selfless publications
This latest publication has giving me a more insight on AC motors
God bless you real Good “Boss”
Thanks Edvard.
since you are specialized for design high power busbar trunking, please provide a guide for that.
Hi Edward. since you accepted my request to join this site, it has help me a lot in my career as pupil engineer. This article is the best so far. Continue to flourish us with the latest information on electrical and electronics. God bless you and the team.
Thank you for the kind words Emmanuel!
i would like this artcle
Hi Edvard – you’re doing a marvelous work. All your articles are highly informative and rich in content, theoretical and practical, as the situation demands.
This particular article is of great value for beginners, O&M personnel, people engaged in energy conservation, etc.
Looking forward to keep learning from you.
Thank you Khalid, I’m doing my best… there will be more, I promise :)
Very nice, thank for information about name plate of electric motors.